


无人机
武汉中观RigelSLAM大空间手持激光3D扫描仪
武汉中观RigelSLAM大空间手持激光3D扫描仪

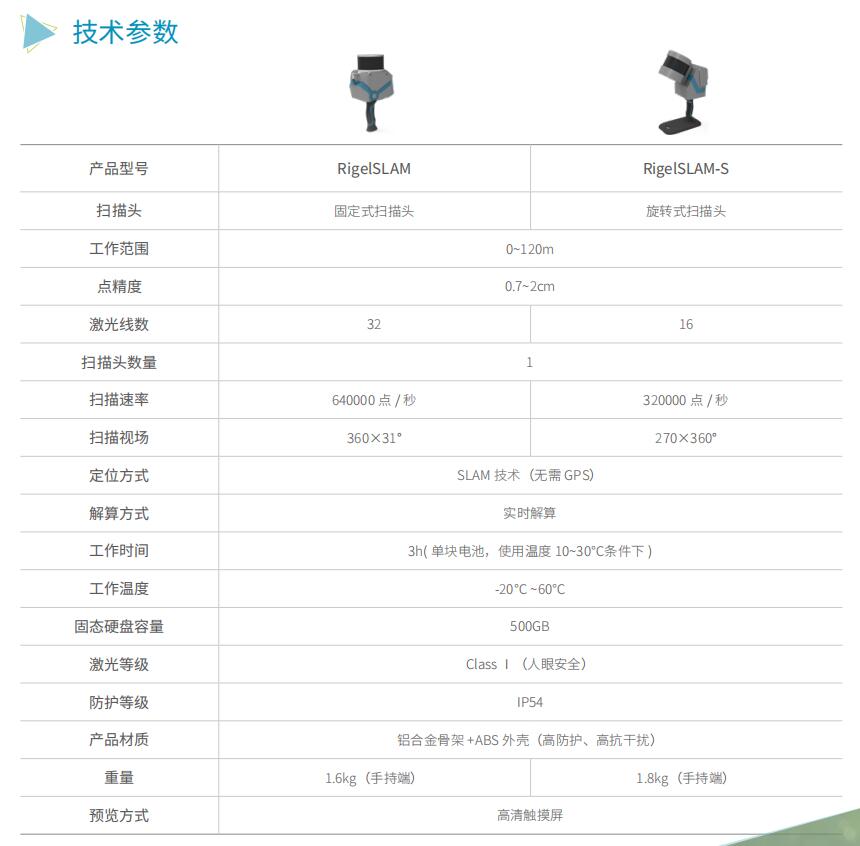
RigelSLAM是中观推出的首款针对大空间的手持激光3D扫描仪,它采用实时定位与建图技术(即SLAM技术,Simultaneous Localization and Mapping),不依赖GPS等GNSS定位,在室内、外等各种未知环境下,均可在移动中进行自身定位及增量式三维建图。Rigel SLAM致力于为用户提供简单、灵活、快捷、高精度的大场景三维测量解决方案。
产品特点:
1.卓越算法精细捕获
性能卓越的SLAM算法,捕捉毫厘之微,在各种复杂场景下,均能保证扫描完美闭合,点精度最高0.7cm (50m处)
2.实时建图导出即用
扫描过程中实时建图并可实时预览,扫描完成无需后处理,建图结果导出即用,作业效率大幅提升
3.双型齐发灵活选择
RigelSLAM设计有固定式扫描头和旋转式扫描头两种型式,固定式相对更轻便、成本更低,旋转式采集更高效且不留死角,两种型式灵活适应不同企业需求
4.室内室外自由移动
内置高精度惯性导航系统,不会跟踪丢失,可在室内狭小空间或室外空旷环境下自由移动
5.经久耐用无惧风雨
具备超强耐候性,可在-20°℃~~60°℃环境下作业,防护等级IP54

卓越算法精细捕获
>>>性能卓越的SLAM算法,捕捉毫厘之微,在各种复杂场景下,均能保证扫描完美闭合,点精度最高0.7cm (50m处)
室内室外自由移动
>>>内置高精度惯性导航系统,不会跟踪丢失,可在室内狭小空间或室外空旷环境下自由移动
实时建图导出即用
>>>扫描过程中实时建图并可实时预览,扫描完成无需后处理,建图结果导出即用,作业效率大幅提升
经久耐用无惧风雨
>>>具备超强耐候性,可在-10℃~45℃环境下作业,防护等级IP54
双型齐发灵活选择
>>>设计有固定式扫描头和旋转式扫描头两种型式,固定式相对更轻便、成本更低,旋转式采集更高效且不留死角,两种型式灵活适应不同企业需求

软件特性
1.自主定位
采用SLAM技术在未知环境中进行自身定位,不依赖GNSS信号
2.实时建图
扫描过程中实时建图,数据导出即用,所见即所得,无需后处理
3.实时浏览
内置高清触摸屏,可在扫描过程中实时浏览点云数据,并进行三维交互,保证数据采集准确完整
4.控制点采集
扫描过程中支持控制点采集功能,配合后处理软件,可将采集数据转入控制点绝对坐标系


客户使用价值
1.智能化、轻量化设计
轻巧便携,开机即用,即便是数字测绘新手,也可一人轻松进行测量工作
2.简便高效
操作简单,边走边采集,快速捕获复杂数据,建图结果导出即用,大幅提升测量工作效率
3.适用于各种环境
适用于各种环境无需GPS定位,能在各种未知环境下,快速获取地理空间信息,特别是复杂/封闭空间
4.经久耐用
设备采用高防护抗干扰材质具备超强耐候性
更多相关
武汉中观RigelSLAM大空间手持激光3D扫描仪
武汉中观RigelSLAM大空间手持激光3D扫描仪 RigelSLAM是中观推出的首款针对大空间的手持激光3D扫描仪,它采用实时定位与建图技术(即SLAM技术,SimultaneousLo...
 环球测绘微信
环球测绘微信